Lorsqu’une personne amputée et dotée d’un bras bionique sans sensibilité tactile cherche à utiliser celui-ci pour attraper quelque chose, toucher une personne ou autre, elle doit faire très attention à surveiller de ses yeux ce qu’elle fait pour être sur de bien toucher cet objet, ne pas le serrer trop fort pour éviter de le casser (ou blesser).
1- Sensibilité du toucher
Utiliser une prothèse le plus naturellement possible après une amputation est complexe, il est aussi important de retrouver la capacité de mouvement que la sensation de toucher, ce sens étant l’un des plus compliqués à reproduire en robotique.
Pour que le porteur de la prothèse puisse retrouver le sens du toucher, il faut exploiter le reste des nerfs du membre amputé et à les relier à une interface plate, nerveuse, imitant l’extrémité d’un doigt humain. Comme il est dit plus haut, grâce à la «réinnervation musculaire ciblée» la personne arrive à manœuvrer sa prothèse de façon presque naturelle.

Cette technologie a été testée en 2013 sur Glen Lehman, un américain amputé de l’avant-bras droit. Sur cette vidéo diffusée par la Darpa on voit l’homme manipuler des objets et rattraper un voile presque aussi aisément qu’avec un véritable bras :
https://www.youtube.com/watch?v=-u8KkvZvVVI
- Une utilisation importante dans la robotique :
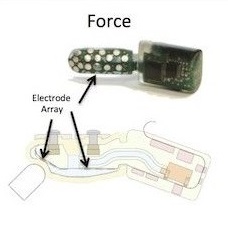
Un capteur appelé Biotac a été développé par des chercheurs américains. Ce capteur est muni d’électrodes et de détecteurs et imite le bout d’un doigt. Il peut sentir le chaud et le froid, déterminer la texture d’une surface et la forme d’un objet grâce à un logiciel. Biotac permet la création de prothèses d’un nouveau genre mais il est surtout utilisé pour les robots industriels.


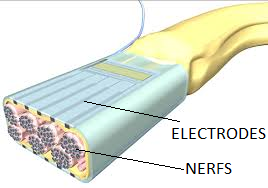
Un robot équipé de capteurs tactiles et capable de reconnaître des textures avec une précision bien meilleur que celle de l’Homme. Le capteur BioTac reproduit les capacités sensorielles du doigt, sa forme et sa texture. Il est fait d’une coque dans laquelle sont placés un capteur de pression, une thermistance et des électrodes qui vont intégrer les informations. Un revêtement en silicone enrobe cette structure, il imite la peau humaine en reproduisant les empreintes digitales. Entre la coque et la peau en silicone, on trouve un fluide conducteur électrique qui va faire l’interaction.
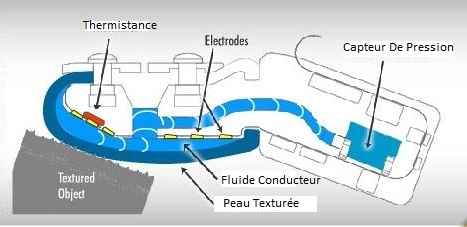
Lorsque le capteur touche un objet extérieur, cela déforme sa peau et fait ainsi circuler le fluide autour des électrodes. L’effet produit sur les capteurs à l’intérieur permet de déterminer le point de contact avec Biotac et la forme de l’objet : ses bords, ses coins, ses surfaces planes et même ses courbures. Ainsi, BioTac réussit à rassembler les capacités sensorielles d’un vrai doigt.
- Détecter la chaleur:
On utilise des capteurs thermiques et des thermistances (ces capteurs sont basés sur la loi de la variation de la résistance électrique en fonction de la température) pour détecter la température. Le robot différencie ainsi le chaud et le froid, comme peut le faire un humain. Pour détecter la température d’un objet, le capteur agit comme un veritable doight : il chauffe le doigt au-delà de la température ambiante et un capteur thermique placé sous la peau en silicone va alors mesurer la différence de température entre la surface du capteur et celle de l’objet. Elle en déduira alors s’il est chaud ou froid.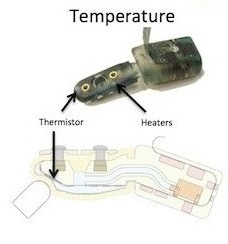
- Détecter des textures :
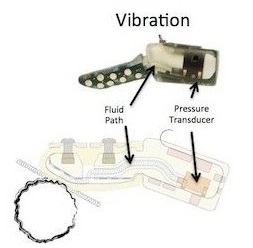
Lorsque le doigt du robot (ou de la prothèse) frotte une surface, les microsillons imitant l’empreinte digitale produisent des vibrations qui sont perçues par le capteur de pression. Le système peut distinguer avec beaucoup de précision les nuances entre différentes textures. Toutes les informations récoltées ont besoin d’être interprétées pour qu’une information puisse en sortir, c’est le rôle d’un algorithme. Lorsque les humains font l’action du toucher, ils explorent un objet avec un certain nombre de mouvements qui sont déterminés par rapport à leur expérience passée. Chaque mouvement amène une information qui va amener à décider quel sera le mouvement suivant à effectuer pour récolter une autre information et ainsi de suite jusqu’à obtenir assez de données sur l’objet ou la surface. BioTac est munis d’un algorithme qui imite cette approche en déterminant quel est le prochain mouvement à effectuer. Dans le cas du robot, celui-ci stocke en mémoire des textures et des propriétés d’objets rencontrés auparavant. Lorsqu’il est confronté à une texture inconnue, il puise dans sa mémoire pour déterminer le niveau de similitude entre ce qu’il touche et ce qu’il connaît déjà. En moyenne, il faut au robot 5 mouvements exploratoires pour identifier une texture avec un taux de réussite de 95,4 %.
Les utilisateurs de prothèses équipées de ces capteurs témoignent comme l’Américain Igor Spetic, 48 ans, qui a perdu sa main droite depuis 4 ans : « Je n’ai rien ressenti d’autre que de la douleur durant deux ans. Mais la nouvelle sensation était fantastique. C’est comme si ma main marchait vraiment, que je n’avais pas de prothèse. C’est aussi proche de la réalité que cela pourrait l’être pour moi. » Ces utilisateurs peuvent désormais empoigner une bouteille en plastique sans l’écraser et se servir eux mêmes ou encore attraper délicatement une tomate cerise sans l’abimer. Grâce à cette nouvelle prothèse, ils ne montrent plus de mouvements involontaires comme c’était le cas avant. Mieux encore, les douleurs fantômes liées à l’amputation ont quasiment disparu, c’est un bonus auquel ils ne s’attendaient pas.
Les résultats sont prometteurs mais, chez l’Homme, les possibilités sont encore limitées ainsi que les sensations perçues. Le système ne permet pas encore à ceux qui en ont besoin de l’utiliser chez eux car les capteurs sont reliés au dispositif à l’exterieur. Des chercheurs travaillent actuellement à concevoir un système intégré, ils pensent que d’ici 5 à 10 ans il sera complètement implanté.
2- Reconnaissance du poids des objets
La personne utilisant un bras bionique doit pouvoir gérer la pression qu’il exerce sur un corps. En effet, une prothèse sans cette capacité reste difficile à utiliser dans la vie courante, le sujet ne se rendant pas compte de la force qu’il exerce, celui ci peut alors, si il ne regarde pas attentivement ce qu’il fait, déformer, briser les objets ou encore blesser une personne (comme lorsqu’il veut lui tenir la main, par exemple).
Comme dit plus haut, on retrouve des capteurs de pression dans les capteurs Biotac. Aussi appelés capteurs de force, ils réagissent à la pression, c’est à dire qu’ils sentent lorsqu’ils touchent quelque chose et peuvent reconnaître le poids de cet objet. Ces dispositifs convertissent une force appliquée sur un objet en signal électrique : lorsque les capteurs de pression sont déformés, ils envoient un signal à un algorithme qui va calculer l’intensité de la pression exercée. On utilise ces dispositifs dans de nombreux domaines comme le tactile ou les balances électroniques.
Grégoire Passault, étudiant ingénieur au LaBRI (le Laboratoire Bordelais de Recherches en Informatique) à Talence, se sert de capteurs de pression sur ses robots joueurs de foot.
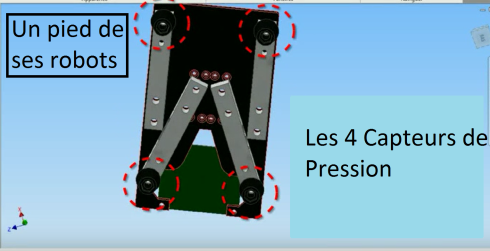
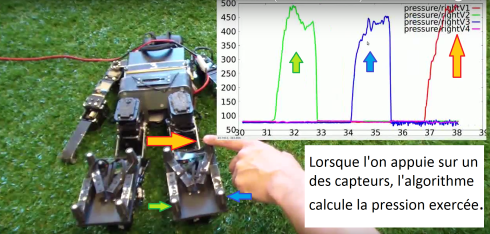
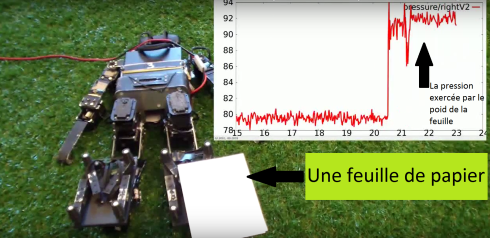
Les capteurs peuvent être réglés pour différentes pressions… Ils peuvent même détecter celle d’une feuille de papier !
Regardez la vidéo complette en cliquant sur le lien ci-dessous :
https://www.youtube.com/watch?v=_d7Phe0qois
